


主要材料
:| PVC线槽 横截面25X15mm,长15cm 3单位 | 电机 N20小电机,轴径1mm1个 |
| 偏心锤 轴孔径1mm1个 | 电池 7号干电池1个 |
| 电池盒 单节7号电池盒1个 | 开关 小型拨动开关1个 |
| 垫片 M3红色垫片3个 | 螺丝/螺母 M2X6mm平头螺丝/螺母1对 |
所需工具
:| 尺子 | 剪刀 |
| 刻刀 |
制作步骤
:第1步:

以此前的机器昆虫基础结构作为机体,再制作一只螳螂机器人,我们也称之为“机械螳螂”,和此前几个机器昆虫相比,机械螳螂还多出了一对大钳子。
第2步:

当前项目的机器昆虫属于振动机器人,也就是借助振动产生的动能进行移动的机器人。
第3步:

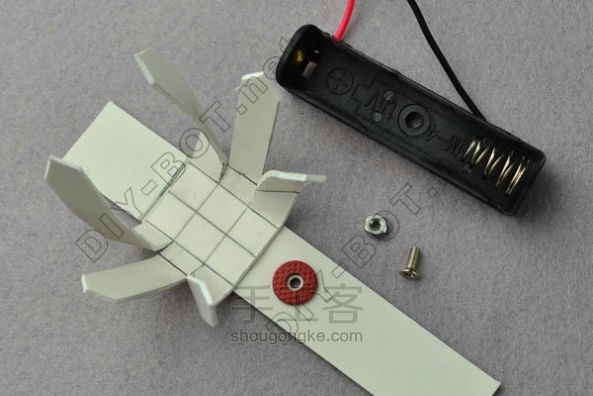
在当前项目中PVC材料的用量就是3个单位(3根)的长为15cm,横截面为25X15mm 的PVC线槽。 以下为各种器材的实物照片。
第4步:

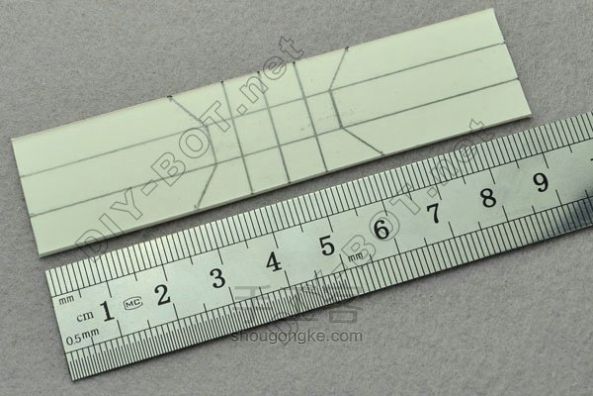
选用横截面为25*15mm左右的PVC线槽的盖子部分,截取9cm长的一段。
第5步:

把线槽盖子两侧的轨道裁切掉,得到一根长9cm、宽1.5cm左右的PVC方条。
第6步:

用铅笔在PVC方条上距离其中一侧边缘4cm的地方用铅笔画一根横截线,并且在横截线中央位置做一个打孔标记。
第7步:

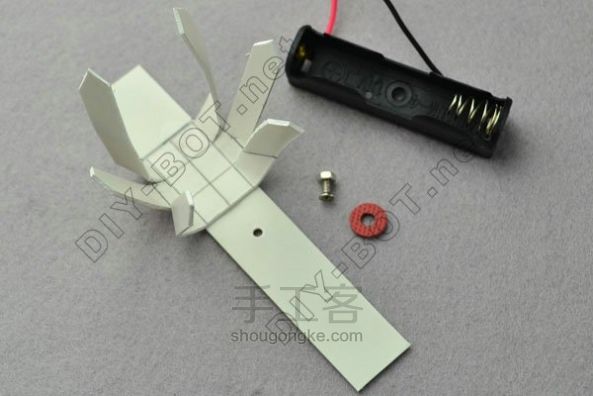
在打孔标记上钻一个直径2mm的小孔,之后用橡皮擦把铅笔的痕迹涂干净,最后得到一块背板。
第8步:

选用横截面为25*15mm左右的PVC线槽的槽部分,截取9cm长的一段。
第9步:

把线槽方槽的两个侧边裁切掉,得到一根长9cm、宽差不多2.5cm的PVC方条。
第10步:
用铅笔在PVC方条上沿纵向画两根等分宽度的直线;横向的中央位置(4.5cm处)画一根中心横截线;中心横截线两侧大约7mm的位置,再各画一根横截线;
在上两根横截线外侧各画如K字形的截线,具体尺寸位置如图所示(大概位置就行,不用很精确)。第11步:
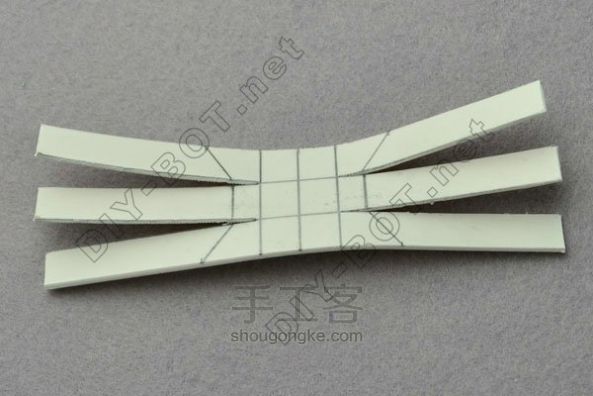
用剪刀从PVC方条两端沿着纵向两根等分线往中间裁剪,剪到中心横截线左右两边的两根横截线的位置,这样得到类似六条腿状的底座结构。
第12步:

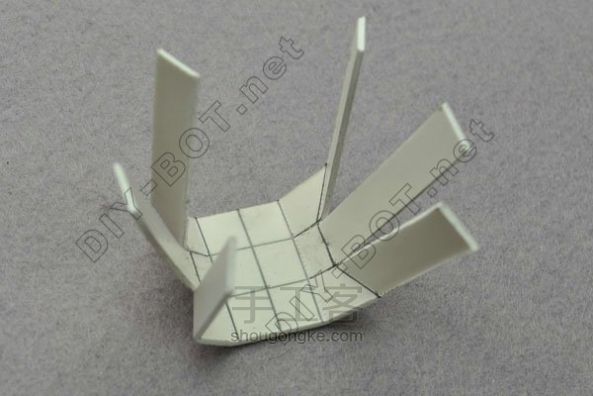
用尖嘴钳沿着中心横截线左右两边的两根横截线的位置,把六条腿状的底座结构两侧各三条腿向画了线的内侧弯折到一定角度(约30度)。
第13步:

第14步:

第15步:
第16步:

用尖嘴钳沿着外侧的四条腿上的斜线,把这四条腿往内侧再弯折一点。这样本来挨在一起并且处于同样平面上的六条腿,就互相错开位置,呈立体状的六足底座结构。
第17步:

第18步:

把六足底座结构立起来,调整各条腿的弯折角度,使得底座处于水平位置。
第19步:
把肢体结构平放在桌面上,让六足底座朝上。
第20步:
在背板的孔上放上一片垫片。
第21步:

把电池盒放到背板上去,并与背板平行。用平头螺丝从电池盒内侧穿入,穿过电池盒与背板之间的垫片,最后从背板上的孔穿出。
把从背板穿出的螺丝,扭上螺母并且拧紧。这样就把电池盒固定在肢体的背板下了。第22步:

把固定在肢体上的电池盒两端红色和黑色的导线,各留出长约1cm左右长度,然后剪断。
第23步:

把上一步骤中剪断得到的黑色导线,焊接到电机的一个电极上。再把背板前端(安装了六足底座一侧)的电池盒导线(图中红色)焊接到电机的另一个电极上。
第24步:

把电机放置在背板前端(安装了六足底座一侧)的正中位置,并且让电机的后部顶住六足底座边缘。用透明胶布把电机和背板捆绑缠绕在一起,使得电机固定在背板下面。
第25步:

第26步:

把电机电极上焊接的黑色长导线沿着电池盒边缘延伸到电池盒后端(原理六足底座)。把位于背板后端(没有安装六足底座一侧)的电池盒导线引出(图中黑色)。把两根导线引出的部分都剪到一样长,并且在前端上好焊锡。
第27步:

把两根黑色导线焊接到拨动开关的两个引脚上(中间引脚和另外任意一个引脚)。
第28步:

用热熔胶把拨动开关固定在背板的尾部,其中让拨动开关的外壳边缘与背板边缘对齐。
第29步:

为了美观,把两根焊接在拨动开关上的黑色导线尽可能理顺埋在背板下而不要漏出来。特别对于从电机上引出的那根导线,要让它从电池盒边缘与背板之间的空隙走线,为了防止翘出来可以在走线沿途点上几滴热熔胶。
第30步:

要把偏心锤安装到电机的转轴上。
第31步:

把偏心锤压入电机轴上不要太深,最后要让偏心锤于电机外壳之间留一点空隙。
第32步:

先制作“胸板”:先剪一块长3cm、宽1.5cm的矩形PVC板,把它的两个长边往内侧剪成凹形,最后得到类似一个“工”字形。
再制作“头部”:取线槽的方槽部分的侧边,剪成一个梯形PVC板,尺寸大约是上底长1cm、 下底长2cm、高1.5cm,其中上底一端是方槽侧边有轨道的一侧(如图中最上面有轨道的分层结构)。第33步:

把头部用502胶水粘贴在肢体的正前方(靠近六足底座的一侧),其中头部结构的梯形短边一侧向前方。
把胸板也用502胶水粘贴在肢体上,其中胸板前端距离头部后端大约2mm的距离。第34步:

使用用红色的M3垫片给机器昆虫做眼睛。
第35步:

用502胶水把两片垫片粘贴在头部的两侧靠前的位置。
第36步:

剪一段大约长5.5cm、宽2.2cm左右的PVC方块。用铅笔如图所示画好类似纺锤形的剪裁标记线。
第37步:

把PVC方块用剪刀沿着画好的标记线剪切下来,做成机器昆虫的腹部。然后用橡皮擦把标记线擦干净。
第38步:

把腹部用502胶水粘贴到背板上,其中腹部前端挨着背板上的螺母位置。
第39步:

第40步:

剪一段大约长6cm、宽2.2cm左右的PVC方块。用铅笔如图所示画好类似纺锤形的剪裁标记线。
第41步:

用剪刀沿着PVC方块上画好的标记线剪切下来,做成机器昆虫的翅膀。然后用橡皮擦把标记线擦干净。
第42步:

用尖嘴钳把翅膀平口的一侧稍微弯折一点。
第43步:

把翅膀用502胶水粘贴在腹部上,其中翅膀平口一侧要顶到胸板后端,502胶水涂在腹部与翅膀重叠的位置即可。
第44步:

第45步:

用剪刀剪两片长约4.5cm 的勺状的结构,作为钳子。再用剪刀剪两个长约3cm的钩状结构,作为钳子上钩子。
第46步:

如图所示,把两个钳子左右对称放置,然后再把钩子用502 胶水粘贴在钳子的前端(粗的一侧)。
第47步:

把六足底座的两只前脚往前抬起,使得前脚离地。再把两只中脚也往前弯折一点,确保两只前脚离地之后,后面的四只脚还能支撑身体的平衡。
第48步:

把一对钳子用502胶水粘贴到一对前脚上,其中钳子的前端稍微往上抬起。
第49步:

最终完成整个机械螳螂的外形设计与制作。
小贴士
:原址:PVCBOT【0号DC4型】机械螳螂--振动机器昆虫
http://www.mongcz.com/archives/14806
大家参照《PVCBOT【0号DC4型】机械螳螂–振动机器昆虫》教程做的作品
关于《PVCBOT【0号DC4型】机械螳螂–振动机器昆虫》教程的评论:





![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](http://imgs.ishougongke.com/Public/data/hand/201506/10/main/14339151911385401359654_593.jpg@!web_course_153)







