

原帖:http://tieba.baidu.com/p/2658079352?pn=1&statsInfo=frs_pager#
主要材料
:| PVC线槽 | 震动马达 |
| 钮扣电池/钮扣电池盒 | LED发光二极管 |
| 拨动开关等 |
所需工具
:| 试电笔 |
制作步骤
:第1步:

第2步:

本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
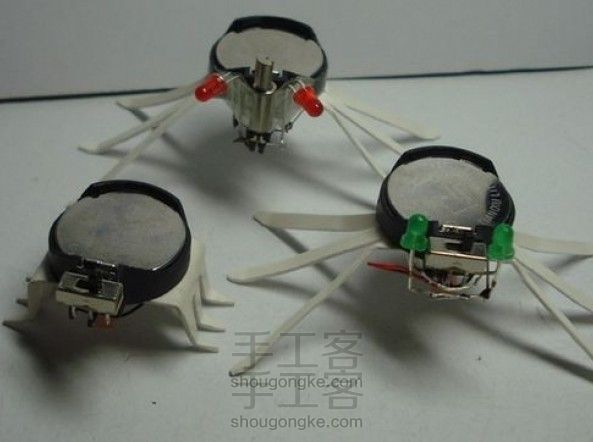
本项目虽然驱动原理比较简单,但是由于造型的差异其实分成了三款不同的机器人(分别是A版、B版、C版),而且由于结构的不同也导致运动的规律和效果有所不同。在开始的时候只是实现了基本的随着震动做不规则运动的效果,后来的升级版本中同时也给后面的B版和C版两款额外增加了一对会发光的眼睛。第3步:

本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。 这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
第4步:
左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
本项目的A版和B版采用的是扁平的震动马达,而C版采用的是普通的震动马达。扁平震动马达的震动(幅度)效果不如普通的震动马达,但是扁平震动马达的消耗电流小,有着更强的续航能力可以持续运动的时间更长。
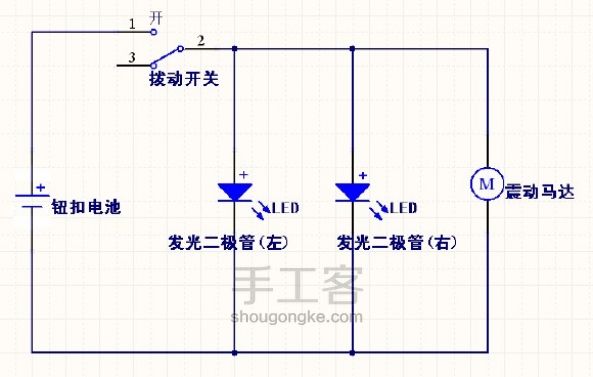
本项目的电路非常简单,只是一个简单的电学电路,稍微有点物理电学知识的人都可以制作出来。第5步:
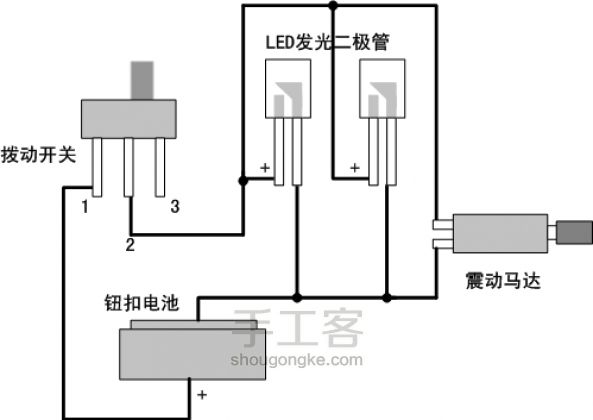
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。 需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。 另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。本项目中对于升级版本的机器人,是使用了两只发光二极管作为眼睛的。机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。 为方便初学者,下面给出电路的接线图。 其中注意: 1、拨动开关选用1、2两个引脚; 2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法); 3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
第6步:
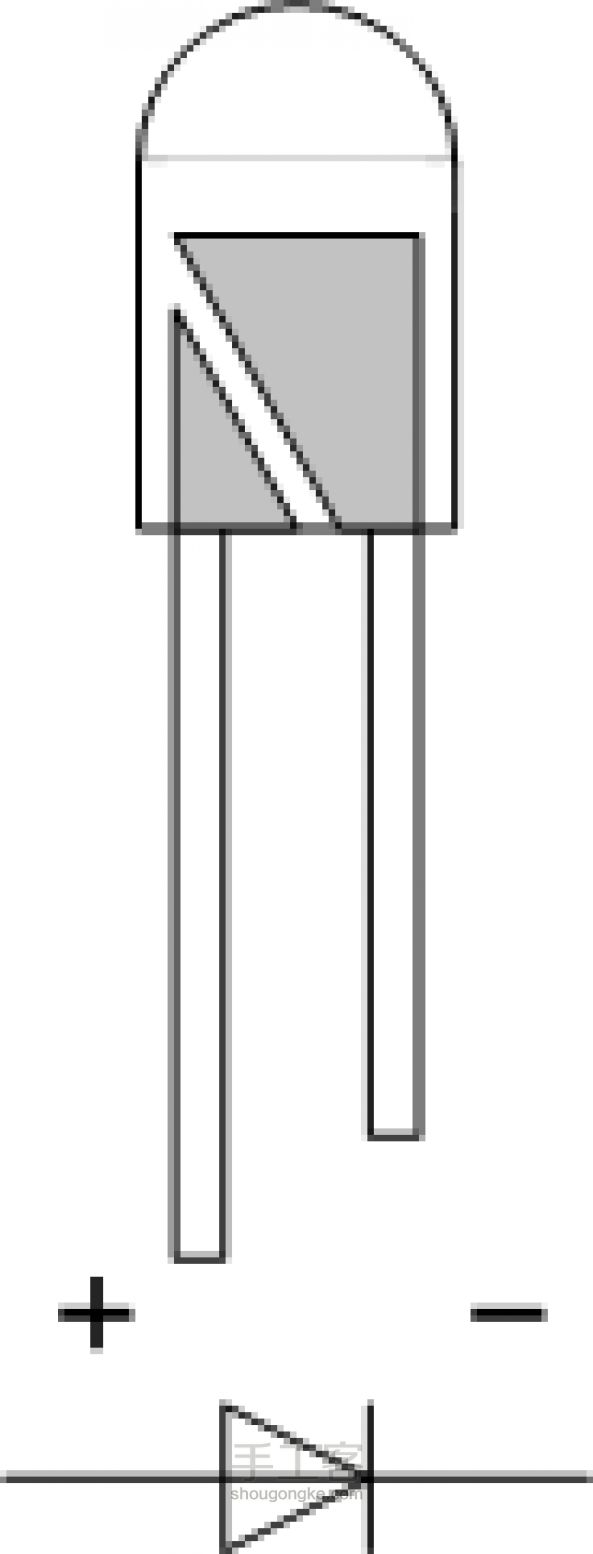
附:如何判别LED二极管的引脚? 方法1:如果是全新的LED二极管,一般其两个引脚的长度是有区别的,通常长的那个引脚为正极,即电子符号的喇叭口一端;
方法2:LED二极管外壳是透明的,可以透过管壳直接看到里面的电极,连接内部三角形大电极的引脚是负极,另一个连接内部小电极的引脚是正极。第7步:

本项目需要的器材主要包括:PVC线槽、震动马达、钮扣电池/钮扣电池盒、LED发光二极管、拨动开关等。
第8步:

本项目建议采用宽度为2.5CM的PVC线槽。
选项 名称 规格 数量 备注
1 必选 PVC线槽 宽度2.5CM长度10CM 1个单位
以下列出本项目的其他主要器件:
PVC-Robot 0号 A/B版
名称 规格 数量 用途
1 震动马达 扁平震动马达 1个 动力
2 拨动开关 小拨动开关 1个 电源开关
3 钮扣电池 型号CR2032 1个 电源
4 钮扣电池盒 配电池型号CR2032 1个 电池盒
5 二极管 LED发光二极管 2个 眼睛
6 导线 随机 1根 电路连接
PVC-Robot 0号 C版
名称 规格 数量 用途
1 震动马达 手机用震动马达 1个 动力
2 拨动开关 小拨动开关 1个 电源开关
3 钮扣电池 型号CR2032 1个 电源
4 钮扣电池盒 配电池型号CR2032 1个 电池盒
5 二极管 LED发光二极管 2个 眼睛
6 电阻 20Ω(色环:红黑黑金棕) 1个 调试备用元件
7 导线 随机 1根 电路连接
收起回复4楼2013-10-19 11:40举报第9步:
第10步:

折好形状后,用笔给两边做如下图的等分标记线。
用剪刀沿着笔迹的线剪开。第11步:

再用剪刀剪成六只腿的形状,各脚之间有空隙,脚前端成圆角尖,并用尖嘴钳折成如下形状的六脚底座。
第12步:

把钮扣电池盒的正极引脚折平。
把钮扣电池盒用502胶水固定在六脚底座上。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。第13步:

再把拨动开关用502胶水粘贴在纽扣电池盒边上突出的一侧 。 特别注意:502胶水不能用得过多,只要蘸一点即可,否则的话很容易让胶水渗入拨动开关内部导致开关失效。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
第14步:

同时注意拨动开关的安装位置正好可以而让拨动开关中间的引脚抵到前面被折平的钮扣电池盒的正极引脚,把拨动开关中间的引脚和电池盒的引脚焊接起来。
第15步:

本款A版的机器人的动力采用的是扁平震动马达,将要把震动马达用502胶水固定在机器人的结构上,但是因为502胶水的渗透性特别强,为了防止胶水渗入马达导致马达卡死失效,首先用透明胶布把扁平震动马达如下图所示包裹起来。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
第16步:

然后再用502胶水涂在透明胶布上并固定在底盘上。
第17步:

按照电路原理图、电路接线图或者下面的焊接示意图,把整个电路焊接好。
第18步:

装上钮扣电池,打开拨动开关测试是否能够启动。如果无法正常启动,则可以对照电路图检查电路连接是否正确。
第19步:

装上钮扣电池,打开拨动开关测试是否能够启动。如果无法正常启动,则可以对照电路图检查电路连接是否正确。
第20步:

第21步:

第22步:

第23步:

第24步:

第25步:

完成后的PVC-Robot No.0—A版。
小贴士
:原帖:http://tieba.baidu.com/p/2658079352?pn=1&statsInfo=frs_pager#





![[普及贴] 作为科技迷,你必须要了解的乐高机器人常识!](http://imgs.ishougongke.com/Public/data/hand/201506/10/main/14339151911385401359654_593.jpg@!web_course_153)







