


主要材料
:| 2mm层板 | 碳纤维管 |
| 飞控 | 电机 |
| 履带套件 |
所需工具
:| 美工刀 | 剪刀 |
| 直尺 | 刻刀 |
制作步骤
:第1步:
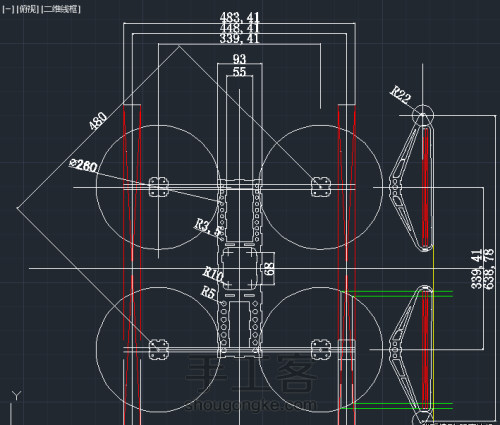
先用autocad做个平面图看看。轴距480左右。这个轴距主要是考虑了市售履带的长度选择的,足够大而又不会增加太多的履带重量
第2步:
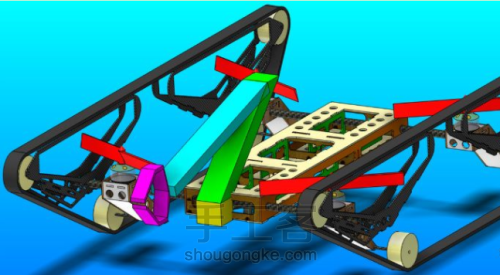
然后做个三维立体图看看有没有装配的干扰
第3步:
为了减重,采用了很多减重孔。
第4步:
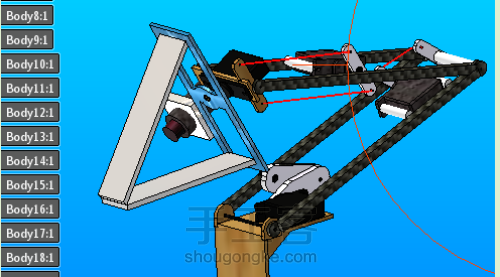
机械臂建模
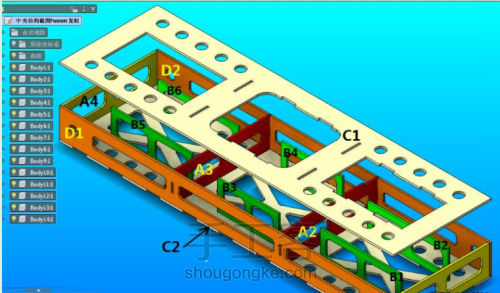
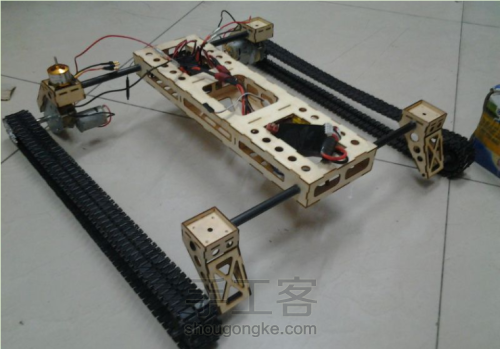
第5步:

层板切割后拼接出了全包式。每个履带承重模块都是闭室桁架结构
第6步:

第7步:
但是发现履带上下对气流阻碍很大,净动力达到重量的2.5倍后装上履带仍很难起飞。
于是改成了下图的结构,试飞成功第8步:

用拉烟开关改进小探照灯。
第9步:

机械臂制作。一个人做,过程图没拍
第10步:

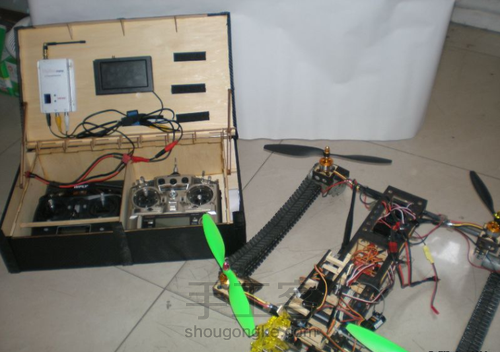
第11步:

特意花了很多层板做了个简陋的地面站。天六控制机械臂、探照灯、和履带;d10控制四轴。箱子两侧都有拉杆可以让箱盖打开后保持在一个角度。箱子表面贴了碳纤贴纸。
第12步:

第13步:
D10后来被借走了。。。后来改用了FF9
第14步:

最后用A4纸做了个外壳把所有的线都包在里面。壳用黑色丙烯装饰
第15步:

试飞照片
第16步:

最后全图(继续打码)
小贴士
:由于履带的波箱很重,必须尽量减少机架的重量,而又保证它的刚度。所以采用了多个闭室的中心版块,2mm层板打了很多减重孔。制成后仅有90g,机臂是12mm碳管。
配置:xxd2212kv1000配1045正反桨;MWC飞控;狮子4S2200mah;ZTW30A甲壳虫;总重1400g;履带是恒龙的3838,塑料波箱,用有刷电调控制。波箱我自己换了传动方向,以使得宽度最窄,减小对气流的阻挡。屏幕是借的俱乐部大哥的5寸屏,感谢。。
履带的控制:两个双向有刷电调设置成V尾混控即可。
其实这个东西履带太重,而且履带的重量不是在四轴中部,而是很靠近电机,不利于稳定的飞行。最好是做一个套圈轮子套住螺旋桨,这样轻便而且可以保护旋翼,倒扣过来也可以走。但是轮子动力不可能从四轴电机获取,除非加离合器?如果是四驱,用四个电机控制,我不太会;如果是用差速器,两个电机,多余的差速器和传动轴重量未知。现有最好的减重办法是,做成后驱,前轮转向。后面两个轮子用一个电机带动一根轴传动,前面两个轮子用舵机转向。这样是一个电机,而且重量比履带小很多。不过那个套圈轮子是难点。骨架最好用碳片做,在一圈上面加上一些导向轮,外面包一圈同步带之类的做轮胎。可我经费不够,时间又不多,就没去做。履带的话,只要搞定两个波箱的控制,设置V尾混控就够了,然后让波箱的俯视面积最小以减少气流的遮挡。出于成本和控制的考虑,我就采用了履带。所以要牺牲重量了。这只是验证一个可能性,希望有时间的人能够改进这个版本。













