

主要材料
:| 小的电机 | 一些齿轮 |
| 一根轴 | 两个轮子 |
| 2个电池盒 |
所需工具
:| 钳子 |
制作步骤
:第1步:

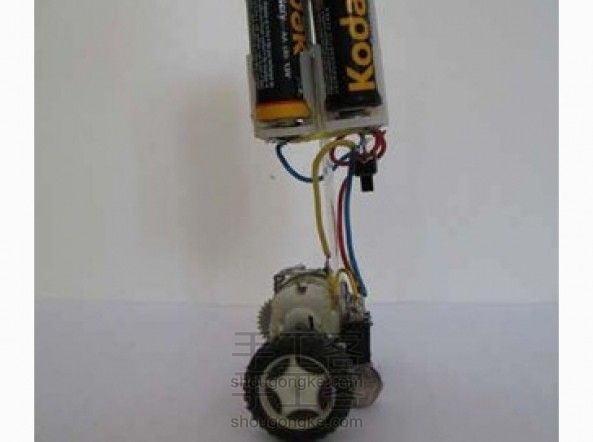
这是一个很简单的机器人,使用一个简单的开关作为传感器,利用倒立摆的机制站站在两个轮子上。
当机器人要倒下的时候,马达就启动了,使机器人向它将要倒下的方向移动。电动机转矩的重心高于马达而使机器人保持平衡。第2步:

所需材料:
你需要以下的设备来完成简易平衡机器人:
1、小的电机;(可以把你的四驱车拆了)第3步:

2、一些齿轮(我想你的四驱车还是不能幸免)
3、一根轴(你就放弃吧,肯定是拆了你的四驱车了)第4步:
4、两个轮子(……)
5、一些塑料片,用来做机器人的轴承套和脖子(脖子,那姑且就这么翻吧)第5步:

6、2个电池盒(2节一组的那种)
第6步:

7、一些电线8、一个纽扣电池
9、一个带金属杠杆的单刀双掷开关
10、一个拨动开关
11、一枚钉子
12、烙铁
13、胶水第7步:

在这一步关键就是要把电机和轴、轮子连接起来,你可以使用上述材料里准备的齿轮、电机、轮子等用你想到的任何办法把他们有机的组合起来,各自发挥吧,或者你也可以用减速电机完成,你怎么完成它并不关键,关键是完成它就对了。
第8步:

第9步:

第10步:

连接机器人的脖子和头
把塑料片用胶水固定到电机上,然后在塑料片的两边分别涂上胶水,把电池盒粘在最高处。(好吧,电池盒和电机之间这段的塑料片就叫做脖子了)第11步:

第12步:

安装传感器
把纽扣电池焊接到微动开关上。把钉子放在火上加热,穿过塑料片,然后把这个微动开关用胶水粘在这个钉子上。注意钉子的位置,要保证纽扣电池能正好碰到地面,这很关键。(这个位置的确定很关键,记得保证机器人垂直于平面)这是这个机器人成功与否的关键。第13步:

第14步:

第15步:

连接开关
在电池盒的一段连上一根线,作为正极,另一端连拨动开关,拨动开关在连一根线,作为负极,然后与马达相连。第16步:
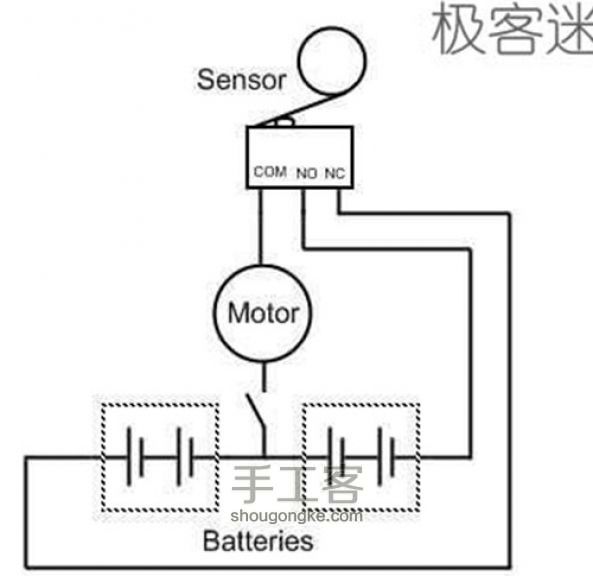
连线
你的连线必须使机器人向它要倒下的方向移动。第17步:

测试
装上电池,让我们看看它是否正常工作吧。调整微动开关的位置,让它工作的更好。如果颠倒了,那就更换一下正负极的电线。










