首先向大家表示歉意,去年发帖展示初代平衡车时就已经承诺编辑出一份制作说明,但一直未能完成,很是抱歉!
原因有四:
1、 太过粗糙,发出来确实有碍观瞻;
2、 上次做车没留下几张照片,无图无真相;
3、 一直工作比较繁忙,实在没能抽出时间;
4、 (接原因2)本意尽快再做一个,留下照片。但女皇迟迟不给批款,所以才延误至今!
此次为了完成自己的承诺,可是耗费了2月的零花钱。并且有视频有真相,希望您能喜欢。
原理简介
“赛格威”平衡车

图片来自 electrictourcompany.com
“赛格威”(英语:Segway)是一种电力驱动、具有自我平衡能力的个人用运输载具,是都市用交通工具的一种。由美国发明家狄恩·卡门与他的DEKA研发公司(DEKA Research and Development Corp.)团队发明设计,并创立思维车责任有限公司(Segway LLC.),自2001年12月起将思维车商业化量产销售。(资料来源:维基百科中文)
“赛格威”是一种让人留下深刻印象的代步工具,它占地不足一平方米,乘车人像使用滑板一样站立其上,双手解放,但却可以仅通过身体移动改变重心位置,就进行前进后退,转弯刹车等操作。传统的交通工具都无法做到随心而动,必须把大部分精力放在控制方向和速度上,而“赛格威”并不需要专门的操控装置,一切由车身自主完成,也由此获得了“平衡车”的别名。
“赛格威”平衡车看来神奇,但你有没有发现它的原理其实很简单呢?拜最新科技所赐,关键零件都可以在淘宝上直接买到,而控制程序也可以查阅原理自行编写。拥有自己的平衡车,其实非常简单。
倒立摆和机器人

“赛格威”的平衡问题,实际上是一个多级倒立摆问题。当一个人用手托住一根竹竿的底部使它在空中竖直不倒下,这就是一个一级倒立摆系统的模型。如果第一根竹竿上面用铰链连着其他竹竿,或者竹竿本身具有一定的弹性(可比拟“赛格威”上的有骨骼和关节的大活人),就成了多级倒立摆。

用手撑竹竿的游戏很多人都玩过,印象最深的应当是它是一个静不稳定系统。在桌面上的水杯能自己站稳,当重心投影落于杯底内时,即使有细小扰动也不会倒下。但是手心里的竹竿大部分时间重心投影不在接触点上,让竹竿保持相对不动靠的是动态调整——竹竿往哪边倒,手就赶紧往哪边凑,让重心回到接触点周围。这就是依靠人眼,大脑和人手完成的动态平衡过程。
人类的大脑在处理这类问题上有先天优势,因为人的走路过程本质上来说是不断前跌的过程,必须依靠实时伸出支撑脚转移重心来保证直立行进的动态平衡。而让机器人做到这一点就很困难,需要综合解决动态控制过程中的线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等诸多细节——所以至今见到的人形机器人里,能僵硬走路的很多,但能和真人一样上蹿下跳的绝无仅有。

两名民警驾驶“赛格威”单人警用巡逻车巡逻。图片来源:新华网
“赛格威”的动态平衡原理和倒立摆相同,将最上方的乘客作为摆臂,然后控制车轮维持系统重心使乘客直立。当驾驶人改变自己身体的角度往前或往后倾时,“赛格威”就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度呈正比以保持平衡。这里的一个巧妙设计是将乘客传感和控制二合一了——“赛格威”前进或后退维持平衡的同时,也达成了按乘客意图前进或后退的目的。最终,熟练的驾驶人可以和自己行走一样,仅凭直觉就能完成前后左右各方向的运动,同时解放双手和大脑思维,这一特点使“赛格威”特别适合游览和警用巡逻。
DIY自己的“赛格威”
和人类行走一样,“赛格威”的控制也需要传感器和致动器。它依靠MEMS技术制造的精密固态陀螺仪和加速度计感应车体的旋转,速度和倾斜,高速微处理器计算传感器数据,并驱动轮毂电机完成前进/后退/差速转弯的动作。而在电路之外,为了让它从实验室中的倒立摆变成实用的代步车,还需要准备一些必需的结构零件和附件。
机械部分

此次设计的机械机构包括一个简单的独立悬挂。缓冲部分直接采用自行车的避震器(需要更换弹簧),机体做得不很紧凑,主要为了能够拆卸折叠,便于收放和运输。(需要说明的是,结构已提交专利申请,请勿用于商业用途。)
整机材料很简单,两个独立驱动的轮子+电机驱动板+车身角度传感器+转弯传感器+电池+一个装下这些东西的盒子 。两个轮子、电机、避震器都是来自淘宝的成品。钣金和机加件为单独加工。
这里贴一些制作图片,详细的零件工程图列在最后。
整机外形

结构细节


电机安装部分

电机为优耐特电机,250W,24v/质量不好,不作推荐。
电机法兰部分剖视

转向机部分:

整机背面

装配过程



锂电池仓

原设计为铅酸电池,后一朋友为我无偿提供了锂电池,在此再次表示感谢。
车铣加工

电机法兰安装


整体安装


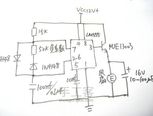
电路部分
主控采用AVR的ATMEGA_32,电机驱动为H桥驱动方式,元件选用的IR2184和IRF1405。传感器选用IDG300和ADXL335,电流传感器为ACS755。另外还有一些外围的小功能,可有可无,不详述了。
控制驱动PCB图

传感器PCB图

PCB空板

焊接需要注意的就是——别太马虎就行。先焊低矮的元器件,再焊大个的!
焊接基本完成

连接电机测试

散热器:

遥控和语音模块

控制程序部分
果壳网友们的素质都很高,这里就提一些关键部分。一些个人认为有用的代码附在最后。
流程图

车身角度获取
选用的传感器为模拟量输出,因此只需要用单片机的AD采集数据后计算出角度值即可,需要注意的是,采集后的数据直接使用效果会很糟糕。需要再次进行滤波计算,得到一个准确、及时、抗扰动的真实角度数据。调速过程中可以用串口将数据输出,辅助调试。
计算车轮速度
这里就是简单的PID控制车轮转速,如果不记得就百度看看。调试参数会花点时间,刚开始参数别调过大,否则抖动起来有危险!另外需要设置角度过大停机的功能。
获取转向数据
转向数据为采集转向电位器而来,采集后的数据进行滤波处理后再用。转向中间设置一个无效的死区,也是防止误动作。
遥控

(图片来自网络)
遥控为最普通的4键遥控器,淘宝成品。
语音
语音选用成品语音模块,厂家提供完整说明文档。
温度
硬件原先选用18b20,很是遗憾这部分程序没调通,可能原因1:系统必须有多处中断,并且中断服务程序比较多,因而打乱了18b20的时序,加上没有示波器,因而没调通。可能原因2:智商问题。
尝试调试了近2小时无果后改用模拟量温度芯片LM35D,电压直接由电阻分压而来。
其余部分可自由发挥。
视频演示
无视频无真相,怕熊上门所以拍了一小段视频。
客厅实在太小,还放了些杂物,能够行走的地方就只有中间一小块了,跑不开。
友情提示:此车有一定危险性,不排除摔倒、失控等问题,在空地上玩玩就好,打算用来代步上班的,请给自己买好保险!
附件1:零件工程图

点击下载完整工程图(文件大小:6.15M)(本设计已提交专利申请,请勿用于商业用途。)
附件2:重点代码
2.1车身角度滤波代码
/************滤波************/ float P[2][2] = {{ 1, 0 },{ 0, 1 }}; float Pdot[4] ={0,0,0,0}; const char C_0 = 1; float q_bias, angle_err, PCt_0, PCt_1, E, K_0, K_1, t_0, t_1; float Q_angle=0.001, Q_gyro=0.003, R_angle=0.5, dt=0.01; void Kalman_Filter(float angle_m,float gyro_m) { angle+=(gyro_m-q_bias) * dt; Pdot[0]=Q_angle - P[0][1] - P[1][0]; Pdot[1]=- P[1][1]; Pdot[2]=- P[1][1]; Pdot[3]=Q_gyro; P[0][0] += Pdot[0] * dt; P[0][1] += Pdot[1] * dt; P[1][0] += Pdot[2] * dt; P[1][1] += Pdot[3] * dt; angle_err = angle_m - angle; PCt_0 = C_0 * P[0][0]; PCt_1 = C_0 * P[1][0]; E = R_angle + C_0 * PCt_0; K_0 = PCt_0 / E; K_1 = PCt_1 / E; t_0 = PCt_0; t_1 = C_0 * P[0][1]; P[0][0] -= K_0 * t_0; P[0][1] -= K_0 * t_1; P[1][0] -= K_1 * t_0; P[1][1] -= K_1 * t_1; angle += K_0 * angle_err; q_bias += K_1 * angle_err; angle_dot = gyro_m-q_bias; } //**************滤波*****************// static float C_angle,C_angle_dot; static float bias_cf; void Complement_filter(float angle_m_cf,float gyro_m_cf) { bias_cf=0.998*bias_cf+0.002*gyro_m_cf; C_angle_dot=gyro_m_cf-bias_cf; C_angle=0.98*(C_angle+C_angle_dot*0.02)+0.02*angle_m_cf; } //***************************** 滤波结束*********************************/
2.2 转向数据处理代码
/************转向************/ void Steering_handle(void) { Buf= 0.9 *Buf + 0.1 * AD_Turn; Turning= Buf -Turn_Zero; // if(Turning <- Turn_Dead) //死区 Turning+=Turn_Dead; else if(Turning> Turn_Dead) Turning-=Turn_Dead; else Turning= 0; if (mode==0) { Drive_A=0; Drive_B=0; if (!(angle>0.1||angle<-0.1)) { mode=1; } } else { if(lab==0) { Turning=0; } else if (Turning>55||Turning<-55)// { Turning=0; lab=3;// turn error } else //按车速整定转向数据 { //buf2=Drivespeed; //if (buf2<0)buf2*=-1; //buf2/=3; //Turning/=buf2; Turning/=1; } Drive_A=Drivespeed-Turning; Drive_B=Drivespeed+Turning; } } //***************************** 转向结束*********************************/
2.3遥控部分状态机
/***********按键********/ #define BOOL int #define FALSE 0 #define TRUE 1 #define INT8U unsigned int /**********硬件接口***********/ #define KEYPIN1 (PINC&(1<<3)) #define KEYPIN2 (~PINB&(1<<0)) #define KEYPIN3 (~PINB&(1<<1)) #define KEYPIN4 (~PINB&(1<<3)) #define KEYPIN5 (~PINB&(1<<4)) /**********按恪键属性**********/ #define KEY_JT 0x0e #define KEY_A 0x0d #define KEY_B 0x0b #define KEY_C 0x07 #define KEY_D 0x08 #define KEY_NULL 0x0f // #define KEY_LONG_PERIOD 250 #define KEY_CONTINUE_PERIOD 25 // #define KEY_DOWN 0x80 #define KEY_LONG 0x40 #define KEY_CONTINUE 0x20 #define KEY_UP 0x10 // #define KEY_STATE_INIT 0 #define KEY_STATE_WOBBLE 1 #define KEY_STATE_PRESS 2 #define KEY_STATE_LONG 3 #define KEY_STATE_CONTINUE 4 #define KEY_STATE_RELEASE 5 uchar KeyScan(void) { if(KEYPIN2==0) return KEY_A; if(KEYPIN3==0) return KEY_B; if(KEYPIN4==0) return KEY_C; if(KEYPIN5==0) return KEY_D; if(KEYPIN1==0) return KEY_JT; return KEY_NULL; } void GetKey(uchar *pKeyValue) { static char KeyState = KEY_STATE_INIT; static char KeyTimeCount = 0; static char LastKey = KEY_NULL; char KeyTemp = KEY_NULL; KeyTemp = KeyScan(); switch(KeyState) { case KEY_STATE_INIT: { if(KEY_NULL!=(KeyTemp)) { KeyState = KEY_STATE_WOBBLE; } } break; case KEY_STATE_WOBBLE: { KeyState = KEY_STATE_PRESS; } break; case KEY_STATE_PRESS: { if(KEY_NULL!=(KeyTemp)) { LastKey = KeyTemp; KeyTemp|=KEY_DOWN; KeyState = KEY_STATE_LONG ; } else { KeyState = KEY_STATE_INIT; } } break; case KEY_STATE_LONG: { if(KEY_NULL !=(KeyTemp)) { if(++KeyTimeCount > KEY_LONG_PERIOD) { KeyTimeCount = 0; KeyTemp|=KEY_LONG; KeyState = KEY_STATE_CONTINUE; } } else { KeyState = KEY_STATE_RELEASE; } } break; case KEY_STATE_CONTINUE: { if(KEY_NULL !=(KeyTemp)) { if(++KeyTimeCount > KEY_CONTINUE_PERIOD) { KeyTimeCount = 0; KeyTemp |= KEY_CONTINUE; } } else { KeyState = KEY_STATE_RELEASE; } } break; case KEY_STATE_RELEASE: { LastKey |=KEY_UP; KeyTemp = LastKey; KeyState = KEY_STATE_INIT; } break; default:break; } *pKeyValue = KeyTemp; }
2.4电池电压
void Get_Batt_Volt(void) { int buf3=0,b=0; buf3=0.9*buf3+0.1*AD_Batt; if (b>10) { Voltage=buf3*3000.0/1024/65; b=10; } else { b++; } }